Technology
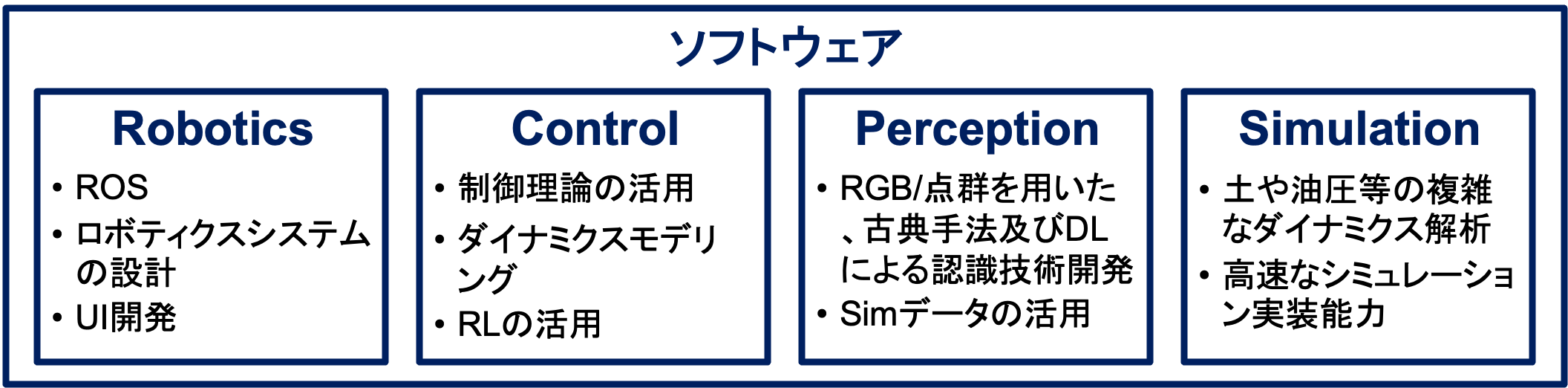
DeepXは建機自動運転システムを一貫して開発するために必要なソフトウェア技術及び開発体制を有しております。開発要素は主に、ロボットシステム(Robotics), 制御(Control)、認識(Perception)、シミュレーション(Simulation)の4つに分けられます。ここでは、各領域の代表的な技術を紹介します。
Robotics
ROSベースのロボットシステム
DeepXでは、システムの頑健性や拡張性を重視し、ROS2をベースとしたロボットシステムを開発しています。
![]()
非エンジニア・現場の方にもフレンドリーなUI
DeepXでは、現場実証や現場導入が近いプロジェクトにおいては、自動運転システムを非エンジニア・現場の方に使用いただくことを想定し、システムのUIをわかりやすく設計・開発しております。また、開発後、試験的な利用でいただくさまざまなフィードバックを踏まえて、UIをさらに洗練させていきます。
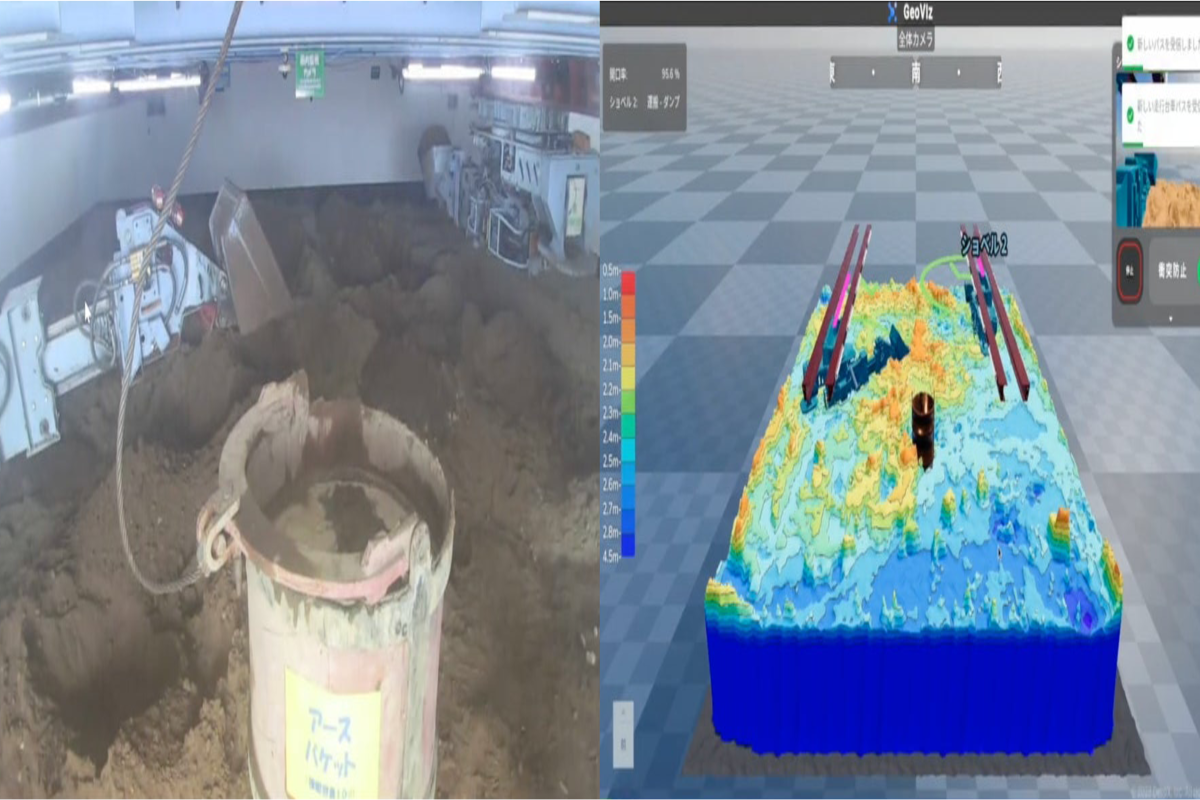
下記の事例では、「掘削エリアと排土エリアをマウスで指定し実行ボタンをクリックする」というマウス操作だけで自動運転作業を指定・実行できるUIを開発しました。
Control
パス生成と軌道追従
建設現場は、状況が絶えず変化するダイナミックな環境で、自動運転システムは多様な条件に対応できる必要があります。DeepXでは、この課題に対処するために、さまざまな機械や地形に適応できるショベルのパス生成技術と軌道追従技術を開発しました。
シミュレーションにおけるパス生成

実環境での軌道追従
当社の汎用的なパス生成技術は、掘削から土運搬、排土までの一連の工程をカバーします。この技術は、熟練オペレーターの専門知識とリアルタイム最適化を組み合わせて、あらゆる地形形状において掘削する土量を最大化します。土運搬においては、最先端のモーションプランニングアルゴリズムが障害物を避けつつ、滑らかな動きを維持しながらナビゲートします。
軌道追従技術は、油圧システムの絶えず変化するダイナミクス、予測不可能な地形、センサーの故障、システムの不安定さに対処します。当社の制御アルゴリズムは、高度なモデリングと広範なシミュレーターベースを活用した最適化によって、これらの不確実性に頑健になるように開発されています。
実際に、この技術は多様な建設現場や機械に適用されており、当社はその汎用性と堅牢性を確認しています。
衝突防止
DeepXでは、現場での安全確保を重視しています。そこで、自動運転時と遠隔操作時のそれぞれについて利用できる衝突防止技術を開発しました。
自動運転時の衝突防止

遠隔操作時の衝突防止
当社の自動運転システムには衝突防止機能が搭載されており、遠隔操作される他の建機の近くで動作し、必要に応じて自動運転中の建機を安全に停止させることができます。
また、遠隔操作向けには、直感的にわかりやすい衝突防止システムを開発しました。新たに開発したこの技術は、オペレーターの操作によって衝突が生じる可能性がある場合、その操作信号のうち衝突を誘発する成分のみを除去することで、オペレータの操作信号の変更を最小限に抑えつつ、建機が安全な距離を維持しながら動作するということを可能にします。
この機能は、高性能なリアルタイムアルゴリズムと先進的な予測モデルによって動作し、将来の周辺物体までの距離を予測します。この衝突防止モデルは、壁、バケット、他の動く機械など、すべての障害物を考慮しています。
Perception
点群データを用いた物体検出
DeepXでは、建機を自動運転させる際にシステムが認識すべき物体(ダンプトラックやアースバケットなど)の検知に、しばしば、Lidarから得られる点群データを入力データとして用い、リアルタイムな検知を実現させます。
下記の事例では、Lidarからの点群データを処理し、油圧ショベルから見たダンプの相対的な位置や姿勢、ベッセルの形状、積み込み状況等をリアルタイムに把握するシステムを開発しました。特に、さまざまな位置や姿勢、土形状などの条件に対応できるようにするために、ディープニューラルネットワークを活用しアルゴリズム開発を行いました。
点群データを用いたマップ生成
DeepXでは、現場において建機の周辺環境の認識や可視化に、しばしば、Lidarから得られる点群データを入力データとして用い、リアルタイムな認識や可視化を実現させます。
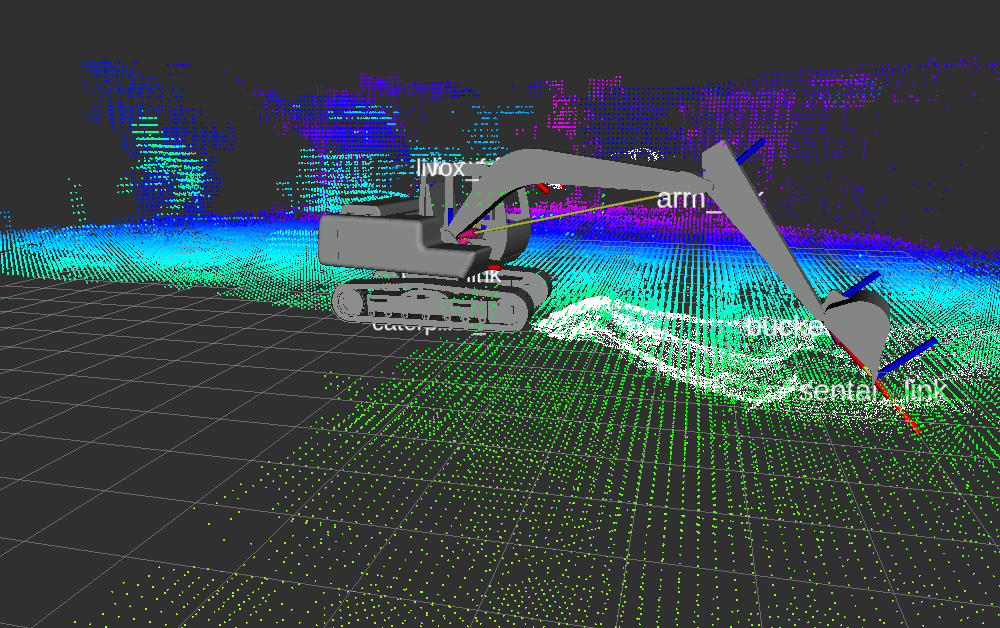
下記の事例では、複数のLidarからの点群データや建機に関するセンサーデータをリアルタイムに処理し、ケーソンショベルの周辺環境や建機自体の位置や姿勢をリアルタイムに把握するシステムを開発しました。
Simulation
Lidarの走査パターンを含む点群データの生成
DeepXでは、点群データを活用した物体検出モデルの開発や学習、検証に、シミュレーションのデータを活用することがあります。実際のLidarのデータは特殊な走査パターンの影響を受けたものが多く、シミュレーション上で対象物の3次元データからランダムサンプリングだけしたデータでは不十分なことが分かっています。
下記の事例では、シミュレーション上でLidarの特殊な走査パターンを再現し、シミュレーション上のLidarデータを実空間向けのモデルやシステムの開発及び検証に用いるようにしました。