DeepXは、2022年、株式会社タダノ(以下、タダノ)とともに、旋回、起伏、ウィンチを同時に用いる揚重操作である三連操作を、荷揺れを一定以下に抑えながら行うクレーン自動化技術を開発し、発表しました。
クレーン操作とその難しさ
クレーンは建築や土木の現場はもちろんのこと、幅広い産業の様々な現場で荷を運ぶ作業に従事する建設機械です。
クレーンには、旋回や起伏、ウィンチ等の操作軸があり、ある地点にある重い吊荷を別の地点に運ぶために、広く用いられます。クレーンのオペレータは自身の目で吊り荷の位置を確認しながら、旋回、起伏、ウィンチ等の複数のレバーを同時に操作する必要があります。
特に、吊荷をワイヤで吊っているため、吊荷は振り子運動を行います。吊荷が揺れる現象(「荷揺れ」という)は、吊荷が重いため非常に危険です。仮に、荷揺れが生じている吊荷に人が接触すると重大事故になりかねません。また、ワイヤの長さが長いため、一度、荷揺れが始まると、自然と荷揺れが収まるまでに長い時間を要します。吊荷を運んだ先には、ほとんどの場合で、人が待機しており、運ばれてきた吊荷をクレーンのフックから外す「玉外し」という作業を行います。
そのため、安全性や生産性の観点から、荷揺れを抑えながら操作することが求められています。
クレーン操作において許容される荷揺れの程度はワイヤの長さに比べて非常に小さい。
見ため以上にクレーン操作を難しくする外乱
さらに、クレーン操作は機械のたわみや風等の外乱による影響を受けます。
吊荷が重いため、ワイヤを支える腕・竿の部分(「ブーム」といいます)やブームを支える筐体がたわむ現象が起きます。たわみの程度は一様でなく、荷重や姿勢などによって異なります。条件によっては、吊荷がある場合、ブーム先端が1メートル以上もたわむこともあります。オペレータは、操作中に刻一刻と変化していくたわみの程度を考慮しつつ、吊荷の位置を目的の位置に運ぶ必要があります。
その上で、吊荷は風の影響によって、無風の時とは異なる挙動を示します。建設現場では、風の方向や強さが、その日の天気や時間・場所によって大きく変わります。一定の方向に風が吹く場合もあれば、突発的にランダムな方向に風が吹く場合もあります。オペレータは、風による影響の全体的な傾向を掴みつつ、予期しない突発的な風による吊荷の動きに臨機応変に対応する必要があります。
こうした外乱の影響に対応するためには、熟練のスキルが必要です。熟練には、3年〜5年、場合によっては、10年もの歳月を要するといわれています。
操作を難しくする要素の例。
産業の課題と操作支援機能や自動運転機能の意義
その一方で、日本においては少子高齢化による生産年齢人口の減少に伴い、建設従事者が減少しています。建設機械を自在に操作できる熟練オペレータの減少も大きな課題となっています。クレーン操作の熟練には、しばしば、他の建設機械の操作以上の年月を要するため、この課題はより一層深刻です。
本取り組みでは、アシスト機能・自動化機能によってクレーン操作の負担軽減や安全性の向上を狙っています。具体的には、AI等を含むリアルタイムな情報処理を行うロボットシステムによって移動式クレーンの操作をより容易化・自動化することで、現場の安全性を向上させることを目的に研究開発を行っています。
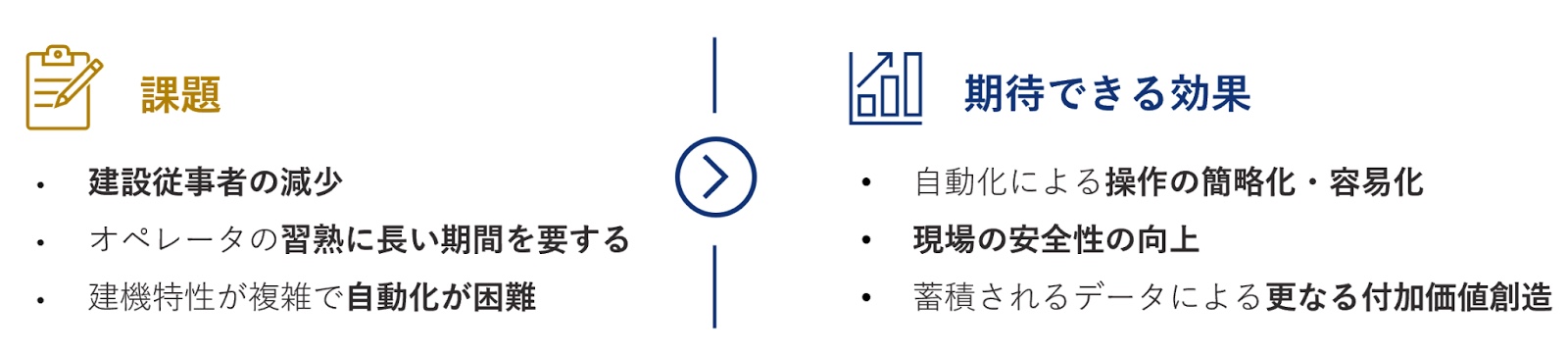
移動式クレーンに関連する課題と自動化によって期待できる効果。
開発したクレーン自動化技術
本取り組みにおいて、旋回、起伏、ウィンチを同時に用いる揚重操作である三連操作を、荷揺れを一定以下に抑えながら行うクレーン自動化技術を開発しました。
この技術は、玉掛け作業(吊荷をワイヤの先端にあるフックにかける作業)及び地切り操作(地面から吊荷を浮かす操作)を行った後の状態で、吊荷を運ぶ目標座標に該当する旋回角度、作業半径、揚程を指定し自動運転プログラムを実行することで、任意の空間点にある吊荷を指定した目標座標に自動で運ぶということを可能にします。また、その時に荷揺れを一定以下に抑えながら運ぶことができます。
現在、開発した自動化ソフトウェアは、中級オペレータ程度の操作性能を有すると評価いただいております。

座席及びブーム先端から見た自動運転中のクレーンや吊荷の様子。
ROS2をベースに、自動化システムを構築
DeepXは、主に、ソフトウェアの開発や提供を担いました。ソフトウェアについては、ベースとなるロボットシステムに加えて、制御のアルゴリズム、開発検証のためのシミュレータを開発しました。その他の試験環境やハードウェアの手配等は、タダノがご対応くださいました。
A. 開発した主要なソフトウェア
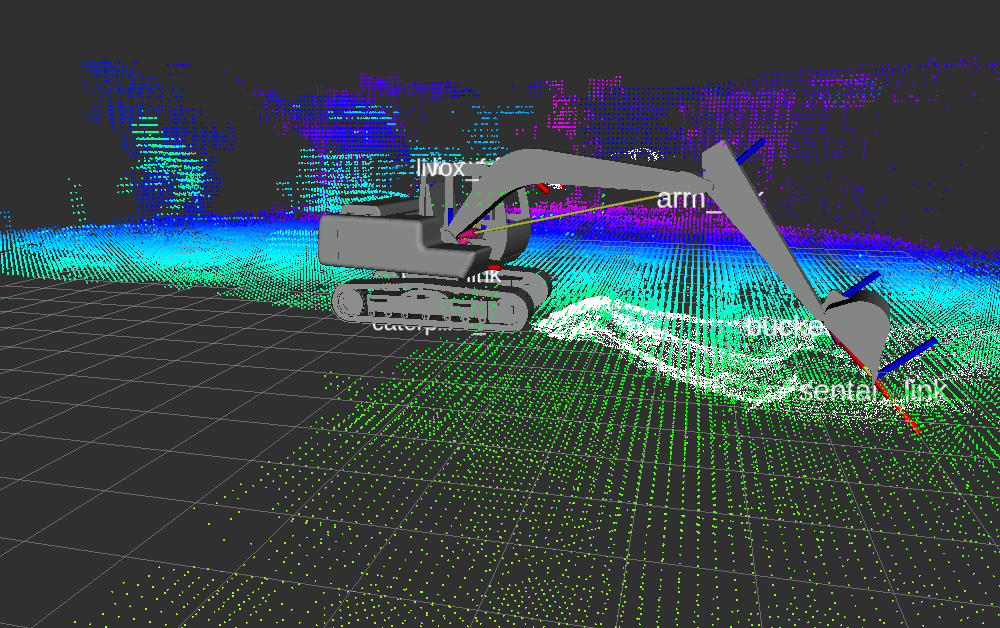
A-1. ロボットシステム
ROS2をベースとしたロボットシステムを開発しました。本取り組みでは、本技術開発の後に本技術の改善や拡張、その後の自動運転システムの開発を見据えており、そのため、特に、システムの頑健性および拡張性を重視した開発を実施しております。
![]()
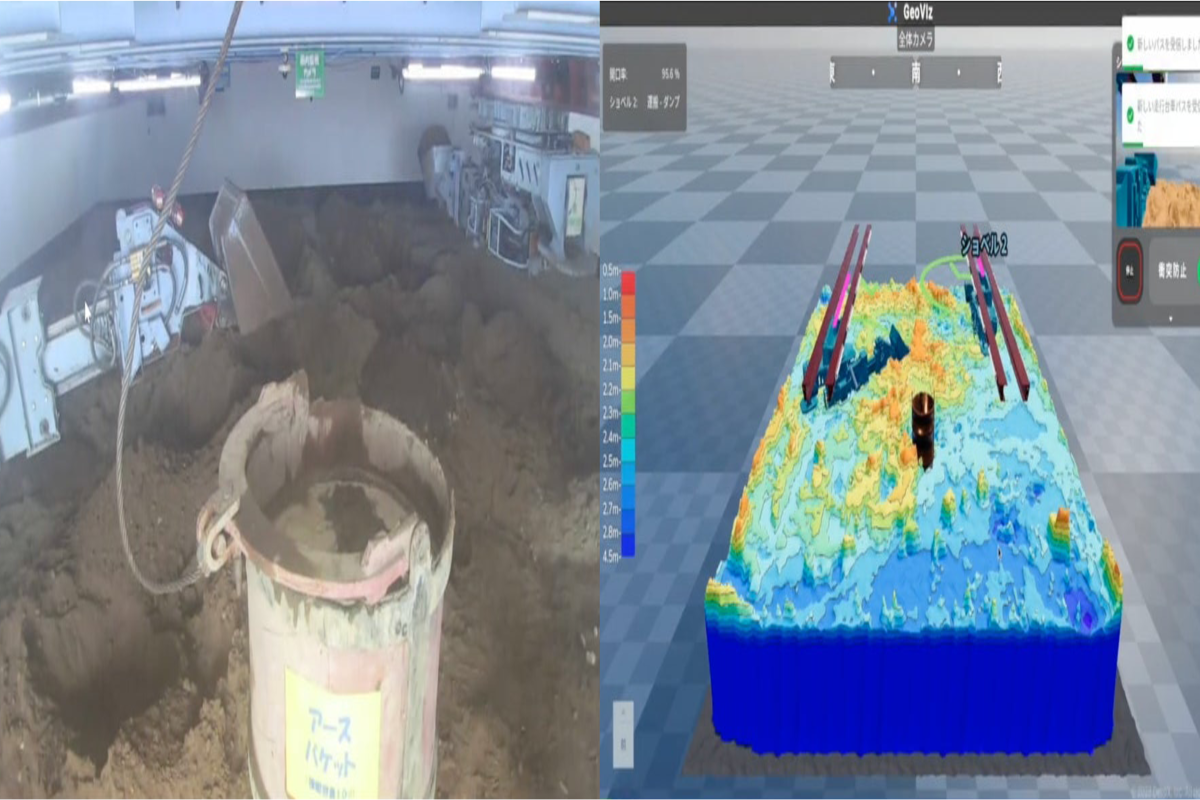
A-2. シミュレータ
クレーンのたわみや油圧アクチュエータ、その他の外乱要素を再現するシミュレータをGazeboをベースに開発しました。
また、ROS2をベースとするロボットシステムと開発したシミュレータを接続でき、シミュレータを通してロボットシステム全体の開発検証を細かく早く実施することができます。
A-2. 制御アルゴリズム
シミュレータを活用し制御モデルの最適化やチューニングを行うアプローチを用いて制御アルゴリズムを開発しました。
このアルゴリズムの特徴は、制御対象のシステムの挙動を一意に同定して設計するのではなく、シミュレーションデータおよび実機の設計値に基づいて適当的な制御アルゴリズムを学習・最適化することで、荷揺れを抑制しながら吊り荷を安全、かつ正確に任意の位置に移動できることです。
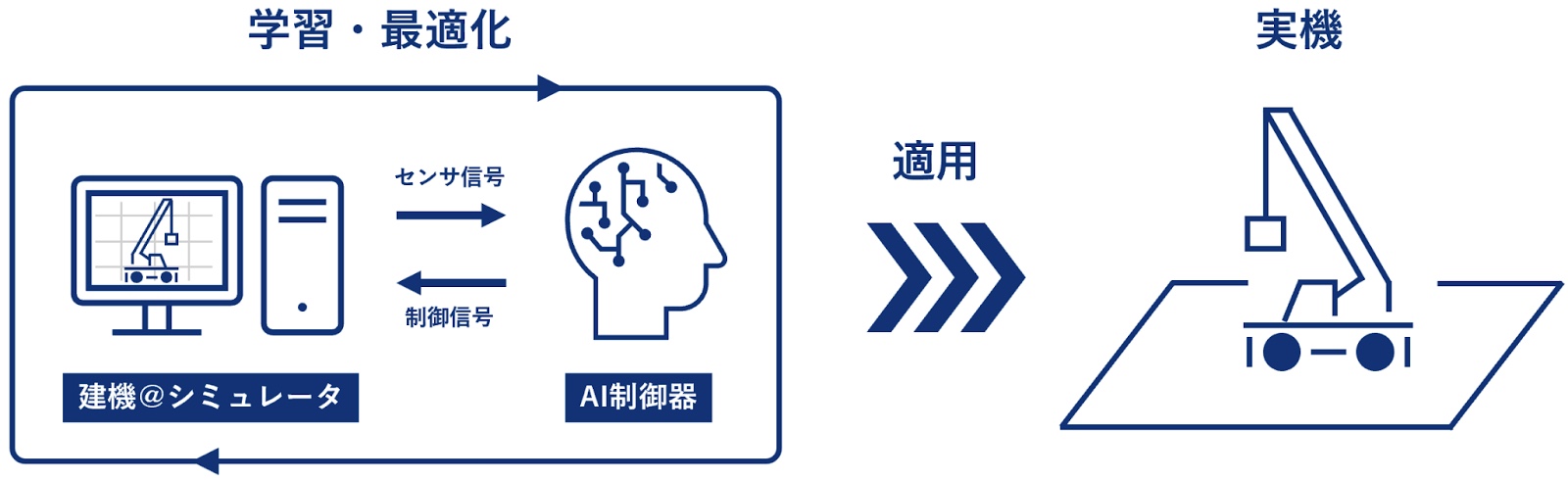
技術的アプローチの概観。
B. 開発組織
本開発では、顧客と密にコミュニケーションし開発の要件定義や実証を推進するソリューションチームと自動運転システムを開発するソフトウェアエンジニアチームが連携し、ソフトウェアの開発を行いました。特にソフトウェアエンジニアチームは多くのメンバーが外国籍でありグローバルなチームとなっています。
今後の展望
移動式クレーンを対象とした、より複雑なクレーン操作の自動化に向けた技術の更なる高度化に取り組む予定です。また、幅広い産業のさまざまなクレーンへのこの技術の社会実装を目指してまいります。
今後も引き続き建機自動運転の実用化に向けたフロンティアを開拓していきたく考えています。

株式会社タダノ
https://www.tadano.co.jp/1955 年に日本発の油圧式トラッククレーンを開発し、建設用クレーンのトップ企業の一つとして業界を牽引。常に時代のニーズを捉えた製品開発に力を入れ、LE(Lifting Equipment)事業で世界No.1を目指しています。1991年にFAUN社、2019年にDemagブランドのクレーン事業を買収し、さらなるグローバル化に取り組んでいます。 また、地域社会・国際社会発展への貢献と地球環境の保全に役立つ事業活動を推進し、すべてのステークホルダーの期待に応え「世界に、そして未来に誇れる企業」を目指しています。